
To develop, test and integrate modern, highly automated or even autonomous driving functions, new capabilities are required. One new and complex discipline is to be able to manage and to automatically process huge amounts of data. This article, based on a use case, shows how data-driven development of AI-based algorithms can be rapidly initiated and implemented at scale using DXC Robotic Drive Cloud.
Autonomous Driving (AD) functions and Advanced Driver Assistance Systems (ADAS) perceive traffic and the environment using cameras, lidar (Light Detection and Ranging), and radar sensors. Any defects or disturbances to the sensors could lead to unintended system behavior. For example, dirt from the road or snow and ice in wintery conditions could block the sensor or limit its ability to perform correctly. This blockage and subsequent impairment could prevent the sensor from detecting relevant objects, or could lead to misidentification of the blockage as objects that are not actually present.
This is why one of the requirements for such sensors is to have a monitoring mechanism that detects any loss in the perception-performance as a result of occlusion. The sensors monitor themselves to detect any disturbances that could impair their ability to sense and interpret the environment accurately. In severe cases of lost perception, countermeasures like automatic cleaning and disabling of system functionality can be initiated.
Monitoring the monitor
To prove and validate that the blockage-monitoring of a sensor works as expected, the detection’s output needs to be compared to a known reference (called ‘ground truth’), but how do you obtain this ground truth? One way is to watch the sensor with an external camera during real operations; record both camera and sensor data; then analyze the performance of the sensor’s blockage detection by comparing it to the video footage of the sensor.
Take, for example, a lidar sensor mounted at the front of a car. The lidar works by emitting and receiving laser beams through a front surface (which is internally monitored for defects and blockages). To obtain the ground truth for this lidar, engineers mount an additional camera to record videos of the sensors’ surface. These videos are processed automatically by computer vision algorithms to detect and mark areas that have become dirty or occluded over time. Finally, these identified regions are collected, stored and used for the validation of the lidar’s own blockage detection mechanism.
Handling the data
To cover as many scenarios as possible, a huge amount of video data needs to be automatically processed and managed efficiently — that of hundreds to thousands of driving hours. Processing this data requires compute power, huge storage and flexibility. Our implemented solution uses DXC Robotic Drive and leverages the benefits of the AWS cloud services for elastic compute and storage. It consists of a subset of DXC Robotic Drive software components, which run in the AWS cloud on top of AWS managed services.
Technical deep dive
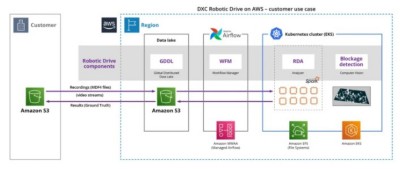
A customer provides the video-recording files in MDF4 format (the standard for automotive) in a customer-owned S3 bucket, which is then synchronized to a DXC-owned S3 bucket. New files automatically trigger a job in the RD Workflow Manager (WFM) component. WFM itself leverages the AWS Managed Workflow for Apache Airflow (MWAA) cloud service to reduce complexity.
The workflow automatically initiates processing of the MDF4 files with the RD Analyzer (RDA) component. RDA runs in an AWS EKS Kubernetes cluster and can process many files in parallel. The size of the Kubernetes cluster is automatically increased or decreased based on the need. It leverages AWS EC2 Spot instances to keep the costs low.
The RDA component extracts the images from the video stream and passes them to a DXC-developed computer vision algorithm, which analyzes the images and detects blockages. The results represent the ground truth information for the video data — they are passed back to the DXC S3 bucket and then automatically to the customer S3 bucket.
The customer advantage
The whole process is end-to-end automated and provides a convenient, on-demand ground truth labeling service: simply upload new video recording files into an S3 bucket and then automatically receive the related result files in the same S3 bucket (after the processing time). The solution significantly simplifies and quickens AD workflows.
A versatile solution
This use case is an example of how DXC Robotic Drive software components and services can be optimized together with the AWS cloud to quickly deliver lightweight AD solutions that provide business value, simplicity and flexible scalability as needed.
The solution uses proven AD software components and eliminates the need to create and manage complex infrastructure. It leverages AWS managed services underneath (where possible) to keep the total cost of ownership low, and improve the flexibility of how fast the solution can be changed to address new business needs.
Speed is an important business advantage in today’s competitive world. To double down on this advantage, the innovation cycle can be accelerated by leveraging AWS out-of-the-box services and creating all infrastructure and deployments in a fully automated way from code. Are you ready to get ahead?
Learn more about DXC Automotive and Luxoft Automotive.
About the authors
Dr. Max Böhm is a senior solutions architect and DXC Distinguished Engineer with over 20 years’ experience in the IT industry and 9 years of research and teaching at universities. He advises customers across industries on their digital journeys, and has created innovative solutions, including real-time management views for global IT infrastructures and data correlation tools that simplify consumption-based billing. He currently works as a solutions architect for DXC Robotic Drive. Max has authored or co-authored over 20 research papers and four patents. He has participated in key industry-research collaborations including projects at CERN.
Dr. Matthias Zobel is an ADAS/AD manager and expert who has been working in ADAS/AD for more than 17 years in various positions since the first camera systems found their way into cars. He is focused and specialized in automotive sensor data processing, and environment perception by means of pattern recognition, machine learning and artificial intelligence. At Luxoft, a DXC Technology company, he works together with the DXC Robotic Drive solution architects on building automated data processing solutions for turning our customers’ data into value. Matthias has authored or co-authored over 20 publications and 15 national and international patent applications.